首页
产品中心
线性传送模组
YX-X 系列 直交机器人
YA-6轴机器人
TRANSERVO 步进马达单轴
水平多关节机器人
YP-X 拾放行机器人
YA-7轴机器人
FLIP-X系列 单轴机器人
Controllers 控制器
PHASER系列 线性马达
产品案例
资讯中心
行业资讯
新闻动态
关于我们
合作客户
在线留言
联系我们
资讯中心
行业资讯
新闻动态
产品推荐
MORE
YAMAHA 4轴机器人配合视觉抓取端子案例演示
YAMAHA机器人 LCM100搬送活用示例
YAMAHA机器人 垂直多关节|LCM100|直交机器人|跟踪施放序案例演示
YAMAHA机器人 全系列组合作业示例及产品说明
行业资讯
当前位置:
主页
>
资讯中心
>
行业资讯
雅马哈RCX-340 4轴机器人控制器中文使用手册和资料
类别:行业资讯
日期:2019-06-04 09:16:42
我要分享
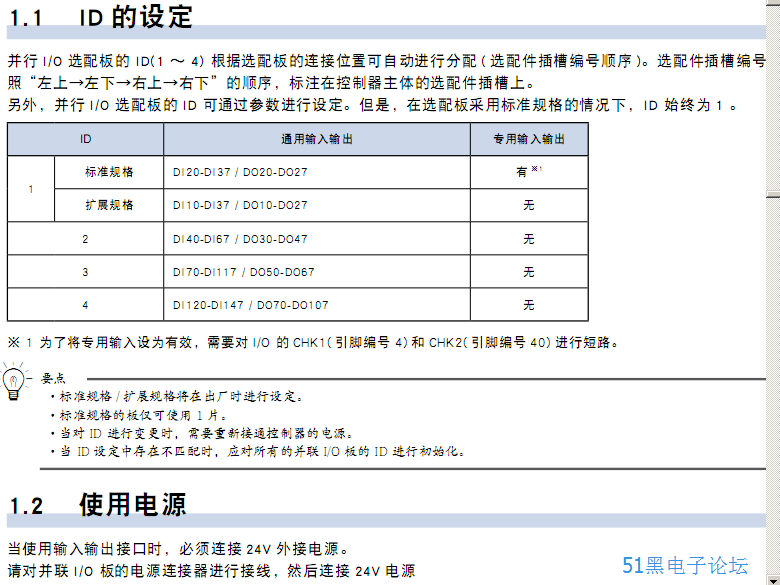
输入输出接口概要
1. 为了支持用户系统,控制器可以选择专用或者通用的输入输出接口。
当希望使用输入输出接口时,应在控制器中追加选配并联 I/O 板。
并联 I/O 板可以选择包含专用输入输出的标准规格以及只有通用输入输出的扩展规格。另外,*多可以安装 4 张。
并联 I/O 板的标准规格 / 扩展规格以及 PNP 规格 /NPN 规格在出厂时确定。
另外,当选择串联 IO(CC-Link,DeviceNet 等)时,除 DI06(停止)外,并联 I/O 板的专用输入将变为无效。
有关 NPN 规格以及 PNP 规格的定义,请参照第 3 章“6. I/O 的连接”。另外,之后输入信号记为 DI,输出信号记为 DO。
了解更多:
雅马哈机器人
完整的pdf格式文档51黑下载地址:
RCX340_UM_C_V1.00_C_0818.pdf
(8.85 MB)
雅马哈YA-RJ垂直多关节7轴机器人 YA-U20F
干货| 雅马哈 PHASER系列 线性马达选型资料手册
返回
在线客服
服务热线
服务热线
18390347027
微信咨询
返回顶部

 RCX340_UM_C_V1.00_C_0818.pdf
RCX340_UM_C_V1.00_C_0818.pdf